Interaction with others is an important part of everyday life. No matter
the situation – whether it be playing a game of chess, carrying a
box together, or navigating lanes of traffic – we’re able to
seamlessly compete against, collaborate with, and acclimate to other
people.



Likewise, as robots become increasingly prevalent and capable, their
interaction with humans and other robots is inevitable. However, despite
the many advances in robot learning, most current algorithms are
designed for robots that act in isolation. These methods miss out on the
fact that other agents are also learning and changing – and so the
behavior the robot learns for the current interaction may not work
during the next one! Instead, can robots learn to seamlessly interact
with humans and other robots by taking their changing strategies into
account? In our new work (paper,
website), we
begin to investigate this question.
Actor-Critic (SAC) assumes that
the opponent (right) follows a fixed strategy, and only blocks on its
left side.
Interactions with humans are difficult for robots because humans and
other intelligent agents don’t have fixed behavior – their
strategies and habits change over time. In other words, they update
their actions in response to the robot and thus continually change the
robot’s learning environment. Consider the robot on the left (the agent)
learning to play air hockey against the non-stationary robot on the
right. Rather than hitting the same shot every time, the other robot
modifies its policy between interactions to exploit the agent’s
weaknesses. If the agent ignores how the other robot changes, then it
will fail to adapt accordingly and learn a poor policy.
The best defense for the agent is to block where it thinks the opponent
will next target. The robot therefore needs to anticipate how the
behavior of the other agent will change, and model how its own actions
affect the other’s behavior. People can deal with these scenarios on a
daily basis (e.g., driving, walking), and they do so without explicitly
modeling every low-level aspect of each other’s policy.

Humans tend to be bounded-rational (i.e., their rationality is limited
by knowledge and computational capacity), and so likely keep track of
much less complex entities during interaction. Inspired by how humans
solve these problems, we recognize that robots also do not need to
explicitly model every low-level action another agent will make.
Instead, we can capture the hidden, underlying intent – what we call
latent strategy (in the sense that it underlies the actions of the
agent) – of other agents through learned low-dimensional
representations. These representations are learned by optimizing neural
networks based on experience interacting with these other agents.
Learning and Influencing Latent Intent
We propose a framework for learning latent representations of another
agent’s policy: Learning and Influencing Latent Intent (LILI). The
agent of our framework identifies the relationship between its behavior
and the other agent’s future strategy, and then leverages these latent
dynamics to influence the other agent, purposely guiding them towards
policies suitable for co-adaptation. At a high level, the robot learns
two things: a way to predict latent strategy, and a policy for
responding to that strategy. The robot learns these during interaction
by “thinking back” to prior experiences, and figuring out what
strategies and policies it should have used.
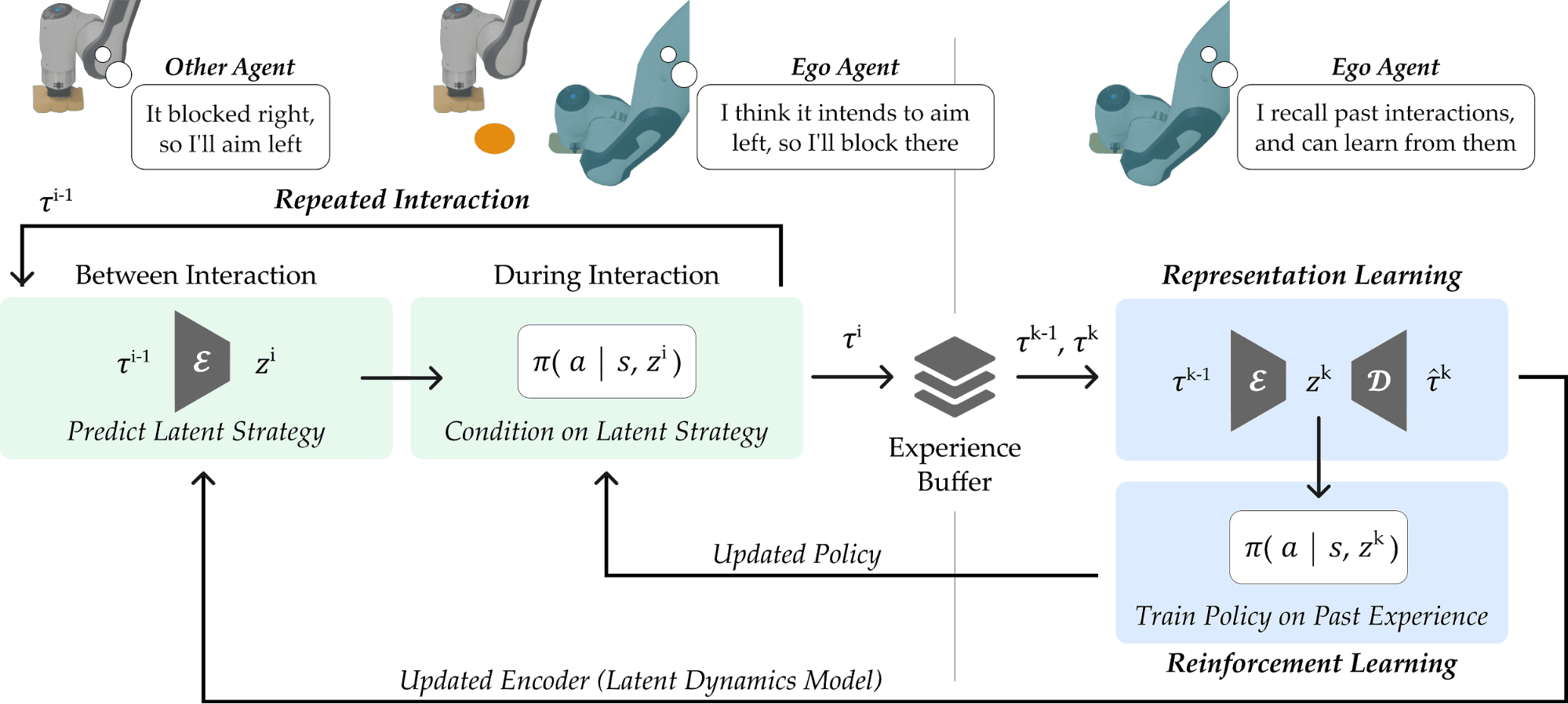
Modeling Agent Strategies
The first step, shown in the left side of the diagram above, is to learn
to represent the behavior of other agents. Many prior works assume
access to the underlying intentions or actions of other agents, which
can be a restrictive assumption. We instead recognize that a
low-dimensional representation of their behavior, i.e., their latent
strategy, can be inferred from the dynamics and rewards experienced by
the agent during the current interaction. Therefore, given a sequence of
interactions, we can train an
encoder-decoder
model; the encoder embeds interaction and predicts the next
latent strategy , and the decoder takes this prediction
and reconstructs the transitions and rewards observed during interaction
.
Influencing by Optimizing for Long-Term Rewards
Given a prediction of what strategy the other agent will follow next,
the agent can learn how to react to it, as illustrated on the right
side of the diagram above. Specifically, we train an agent policy
with reinforcement learning (RL) to
make decisions conditioned on the latent strategy predicted
by the encoder.
However, beyond simply reacting to the predicted latent strategy, an
intelligent agent should proactively influence this strategy to
maximize rewards over repeated interactions. Returning to our hockey
example, consider an opponent with three different strategies: it fires
to the left, down the middle, or to the right. Moreover, left-side shots
are easier for the agent to block and so gives a higher reward when
successfully blocked. The agent should influence its opponent to adopt
the left strategy more frequently in order to earn higher long-term
rewards.
For learning this influential behavior, we train the agent policy
to maximize rewards across multiple interactions:
With this objective, the agent learns to generate interactions that
influence the other agent, and hence the system, toward outcomes that
are more desirable for the agent or for the team as a whole.
Experiments
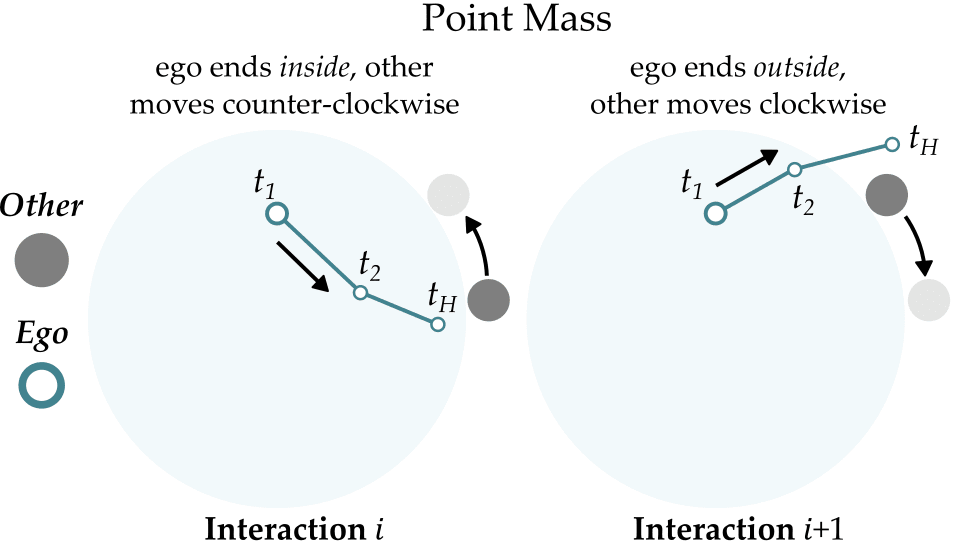
2D Navigation
We first consider a simple point mass navigation task. Similar to
pursuit-evasion games, the agent needs to reach the other agent (i.e.,
the target) in a 2D plane. This target moves one step clockwise or
counterclockwise around a circle depending on where the agent ended the
previous interaction. Because the agent starts off-center, some target
locations can be reached more efficiently than others. Importantly, the
agent never observes the location of the target.
Below, we visualize 25 consecutive interactions from policies learned by
Soft Actor-Critic (SAC) (a standard RL algorithm), LILI (no influence),
and LILI. LILI (no influence) corresponds to our approach without the
influencing objective; i.e., the agent optimizes rewards accumulated in
a single interaction. The gray circle represents the target, while the
teal line marks the trajectory taken by the agent and the teal circle
marks the agent’s position at the final timestep of the interaction.
The SAC policy, at convergence, moves to the center of the circle in
every interaction. Without knowledge of or any mechanism to infer where
the other agent is, the center of the circle gives the highest stable
rewards. In contrast, LILI (no influence) successfully models the other
agent’s behavior dynamics and correctly navigates to the other agent,
but isn’t trained to influence the other agent. Our full approach LILI
does learn to influence: it traps the other agent at the top of the
circle, where the other agent is closest to the agent’s starting
position and yields the highest rewards.
Robotic Air Hockey
Next, we evaluate our approach on the air hockey task, played between
two robotic agents. The agent first learns alongside a robot opponent,
then plays against a human opponent. The opponent is a rule-based agent
which always aims away from where the agent last blocked. When blocking,
the robot does not know where the opponent is aiming, and only observes
the vertical position of the puck. We additionally give the robot a
bonus reward if it blocks a shot on the left of the board, which
incentivizes the agent to influence the opponent into aiming left.
In contrast to the SAC agent, the LILI agent learns to anticipate
the opponent’s future strategies and successfully block the different
incoming shots.
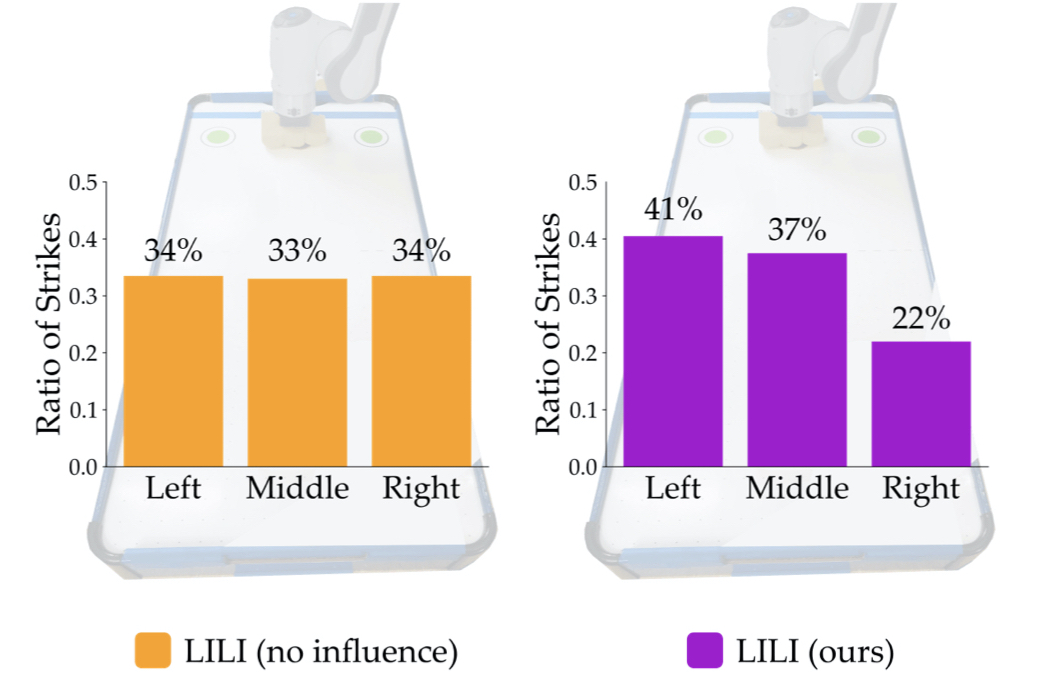
Because the agent receives a bonus reward for blocking left, it should
lead the opponent into firing left more often. LILI (no influence) fails
to guide the opponent into taking advantage of this bonus: the
distribution over the opponent’s strategies is uniform. In contrast,
LILI leads the opponent to strike left 41% of the time, demonstrating
the agent’s ability to influence the opponent. Specifically, the agent
manipulates the opponent into alternating between the left and middle
strategies.
Finally, we test the policy learned by LILI (no influence) against a
human player following the same strategy pattern as the robot opponent.
Importantly, the human has imperfect aim and so introduces new noise to
the environment. We originally intended to test our approach LILI with
human opponents, but we found that – although LILI worked well when
playing against another robot – the learned policy was too brittle
and did not generalize to playing alongside human opponents. However,
the policy learned with LILI (no influence) was able to block 73% of
shots from the human.
Final Thoughts
We proposed a framework for multi-agent interaction that represents the
behavior of other agents with learned high-level strategies, and
incorporates these strategies into an RL algorithm. Robots with our
approach were able to anticipate how their behavior would affect another
agent’s latent strategy, and actively influenced that agent for more
seamless co-adaptation.
Our work represents a step towards building robots that act alongside
humans and other agents. To this end, we’re excited about these next
steps:
-
The agents we examined in our experiments had a small number of simple strategies determining their behavior. We’d like to study the scalability of our approach to more complex agent strategies that we’re likely to see in humans and intelligent agents.
-
Instead of training alongside artificial agents, we hope to study the human-in-the-loop setting in order to adapt to the dynamic needs and preferences of real people.
This post is based on the following paper:
Annie Xie, Dylan P. Losey, Ryan Tolsma, Chelsea Finn, Dorsa Sadigh.
Learning Latent Representations for Multi-Agent Interaction.
Project webpage
Finally, thanks to Dylan Losey, Chelsea Finn, Dorsa Sadigh, Andrey Kurenkov, and Michelle Lee for valuable feedback on this post.