![]()
The Conference on Robot Learning (CoRL 2021)
will take place next week. We’re excited to share all the work from SAIL that will be presented, and you’ll find links to papers, videos and blogs below. Feel free to reach out to the contact authors directly to learn more about the work that’s happening at Stanford!
List of Accepted Papers
LILA: Language-Informed Latent Actions
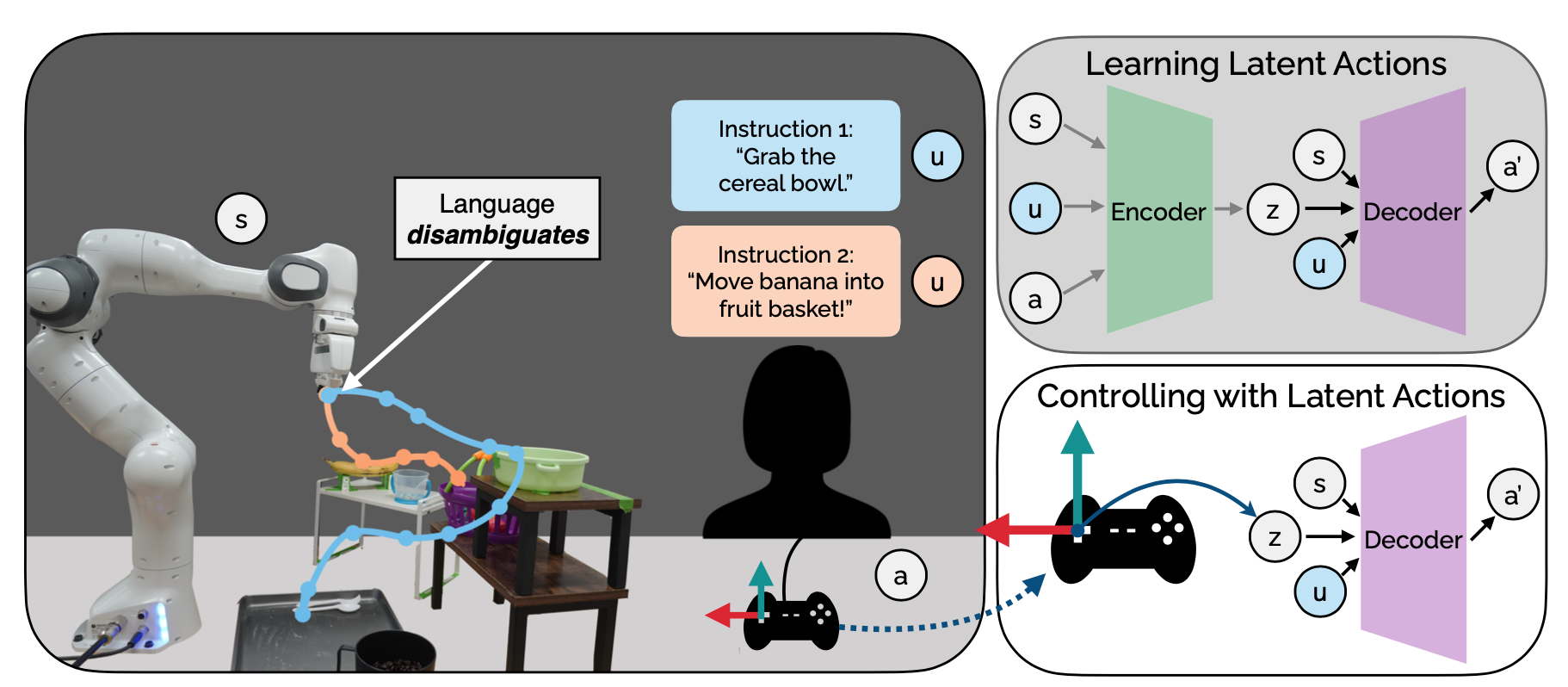
Authors: Siddharth Karamcheti*, Megha Srivastava*, Percy Liang, Dorsa Sadigh
Contact: skaramcheti@cs.stanford.edu, megha@cs.stanford.edu
Keywords: natural language, shared autonomy, human-robot interaction
BEHAVIOR: Benchmark for Everyday Household Activities in Virtual, Interactive, and Ecological Environments
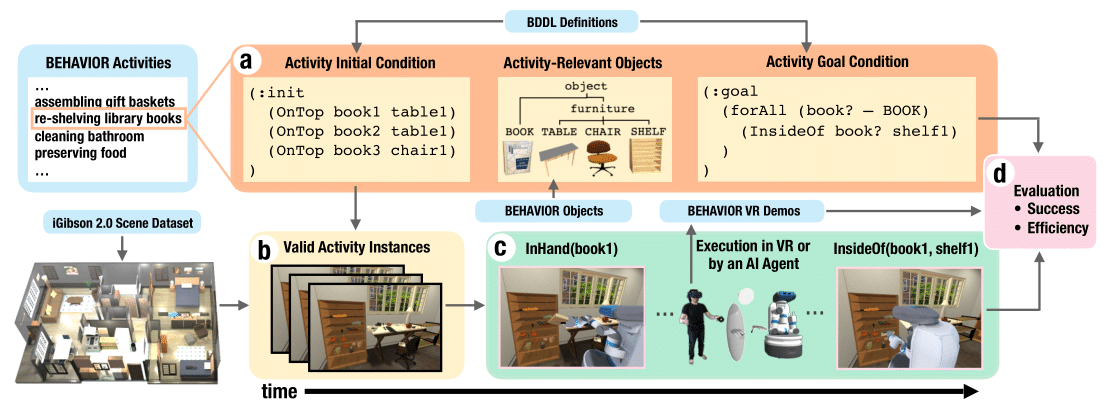
Authors: Sanjana Srivastava*, Chengshu Li*, Michael Lingelbach*, Roberto Martín-Martín*, Fei Xia, Kent Vainio, Zheng Lian, Cem Gokmen, Shyamal Buch, C. Karen Liu, Silvio Savarese, Hyowon Gweon, Jiajun Wu, Li Fei-Fei
Contact: sanjana2@stanford.edu
Links: Paper | Website
Keywords: embodied ai, benchmarking, household activities
Co-GAIL: Learning Diverse Strategies for Human-Robot Collaboration

Authors: Chen Wang, Claudia Pérez-D’Arpino, Danfei Xu, Li Fei-Fei, C. Karen Liu, Silvio Savarese
Contact: chenwj@stanford.edu
Links: Paper | Website
Keywords: learning for human-robot collaboration, imitation learning
DiffImpact: Differentiable Rendering and Identification of Impact Sounds
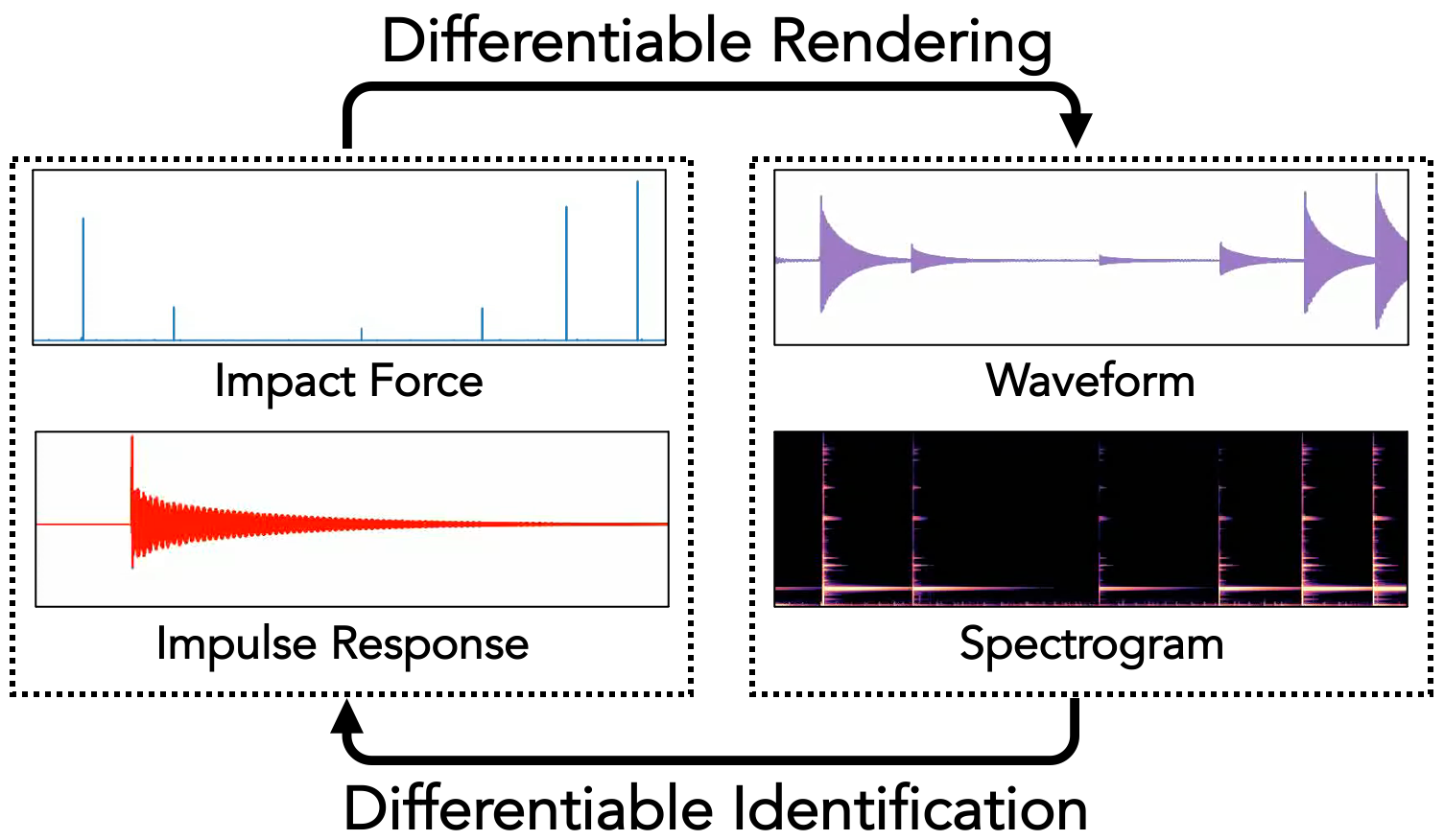
Authors: Samuel Clarke, Negin Heravi, Mark Rau, Ruohan Gao, Jiajun Wu, Doug James, Jeannette Bohg
Contact: spclarke@stanford.edu
Links: Paper | Website
Keywords: differentiable sound rendering, auditory scene analysis
Example-Driven Model-Based Reinforcement Learning for Solving Long-Horizon Visuomotor Tasks
Authors: Bohan Wu, Suraj Nair, Li Fei-Fei*, Chelsea Finn*
Contact: bohanwu@cs.stanford.edu
Links: Paper
Keywords: model-based reinforcement learning, long-horizon tasks
GRAC: Self-Guided and Self-Regularized Actor-Critic
Authors: Lin Shao, Yifan You, Mengyuan Yan, Shenli Yuan, Qingyun Sun, Jeannette Bohg
Contact: harry473417@ucla.edu
Links: Paper | Website
Keywords: deep reinforcement learning, q-learning
Influencing Towards Stable Multi-Agent Interactions
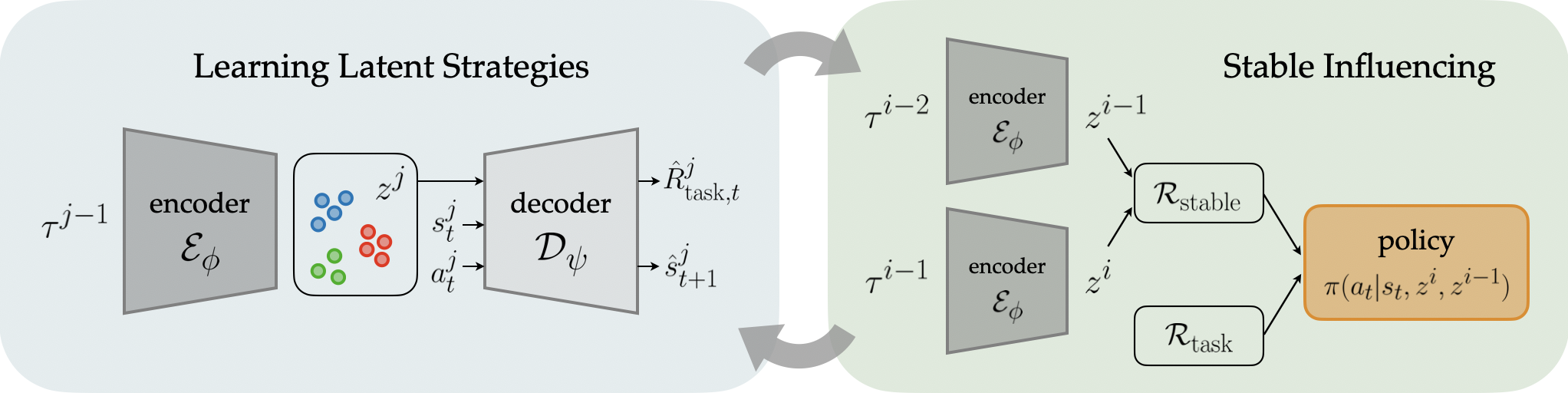
Authors: Woodrow Z. Wang, Andy Shih, Annie Xie, Dorsa Sadigh
Contact: woodywang153@gmail.com
Award nominations: Oral presentation
Links: Paper | Website
Keywords: multi-agent interactions, human-robot interaction, non-stationarity
Learning Language-Conditioned Robot Behavior from Offline Data and Crowd-Sourced Annotation
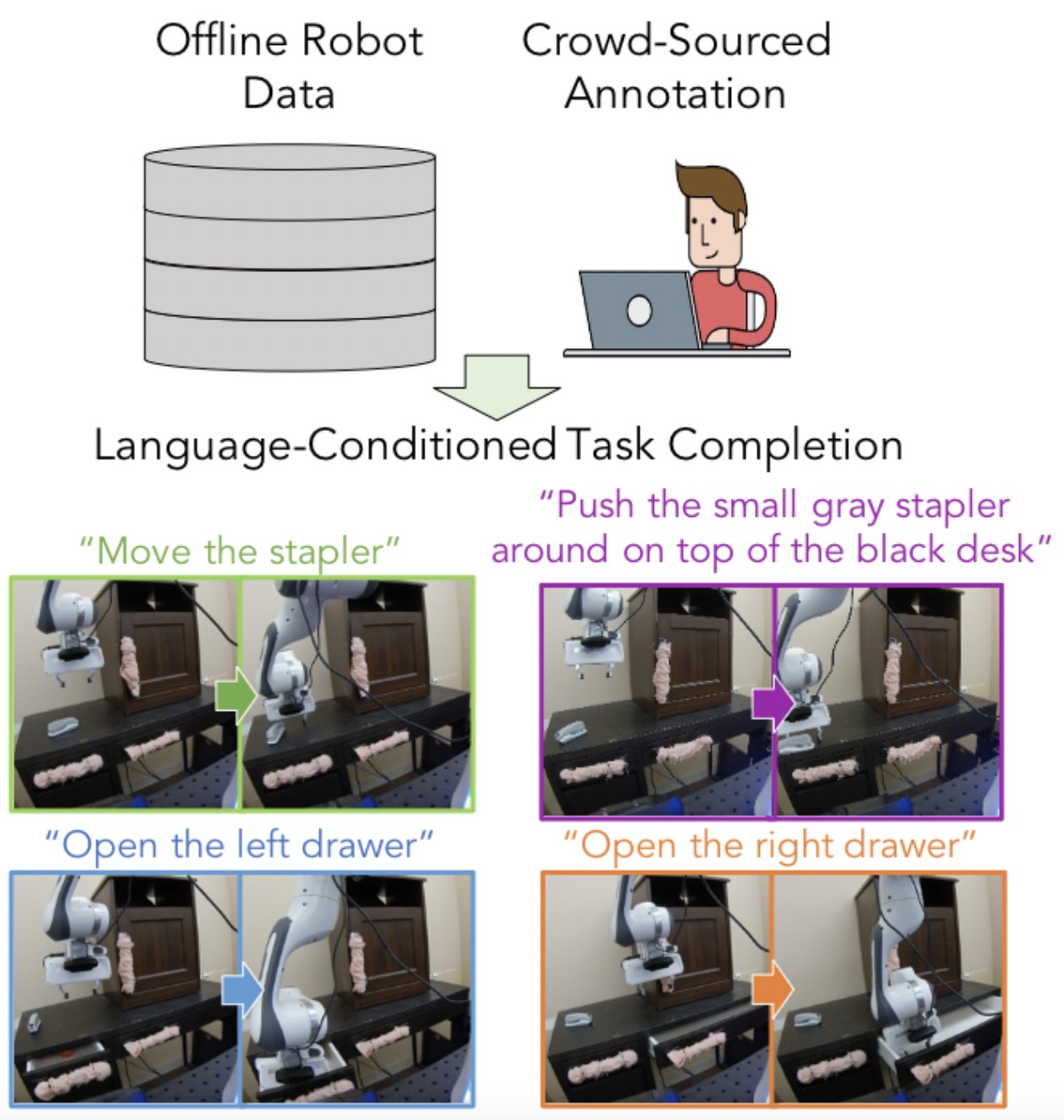
Authors: Suraj Nair, Eric Mitchell, Kevin Chen, Brian Ichter, Silvio Savarese, Chelsea Finn
Contact: surajn@stanford.edu
Links: Paper | Website
Keywords: natural language, offline rl, visuomotor manipulation
Learning Multimodal Rewards from Rankings
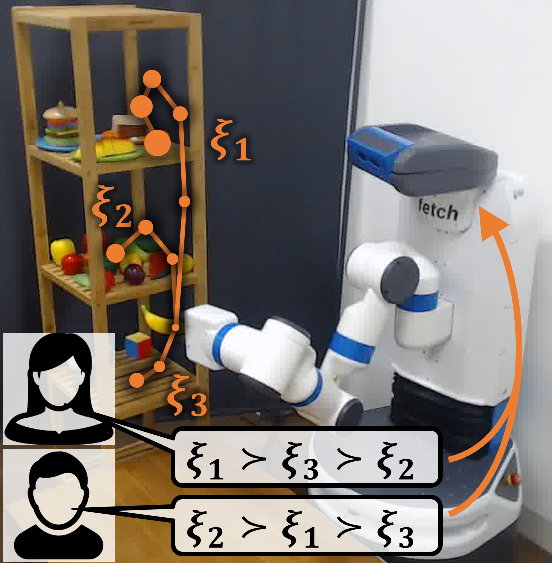
Authors: Vivek Myers, Erdem Bıyık, Nima Anari, Dorsa Sadigh
Contact: ebiyik@stanford.edu
Links: Paper | Video | Website
Keywords: reward learning, active learning, learning from rankings, multimodality
Learning Reward Functions from Scale Feedback
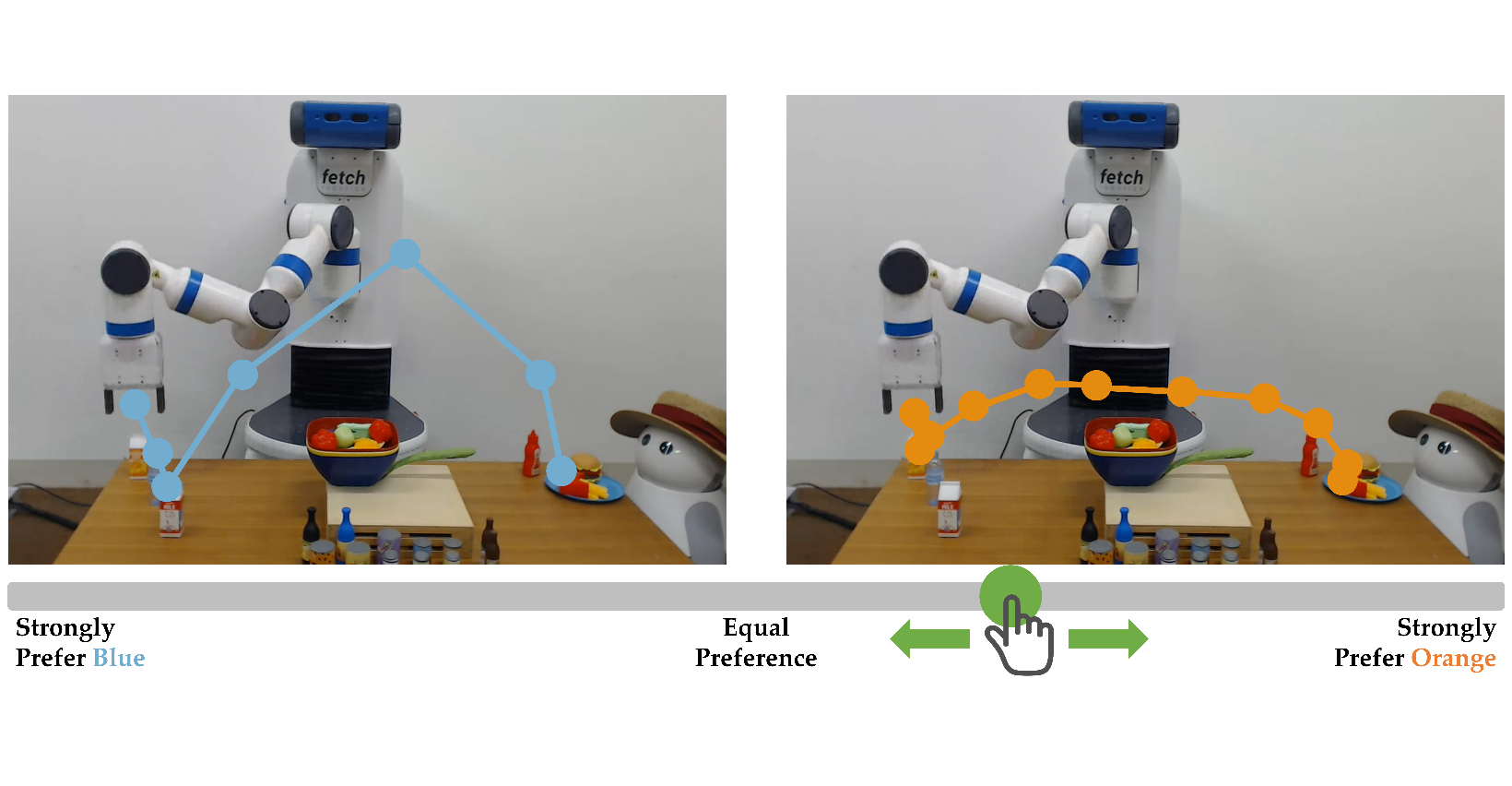
Authors: Nils Wilde*, Erdem Bıyık*, Dorsa Sadigh, Stephen L. Smith
Contact: ebiyik@stanford.edu
Links: Paper | Video | Website
Keywords: preference-based learning, reward learning, active learning, scale feedback
Learning to Regrasp by Learning to Place
Authors: Shuo Cheng, Kaichun Mo, Lin Shao
Contact: lins2@stanford.edu
Links: Paper | Website
Keywords: regrasping, object placement, robotic manipulation
Learning to be Multimodal : Co-evolving Sensory Modalities and Sensor Properties
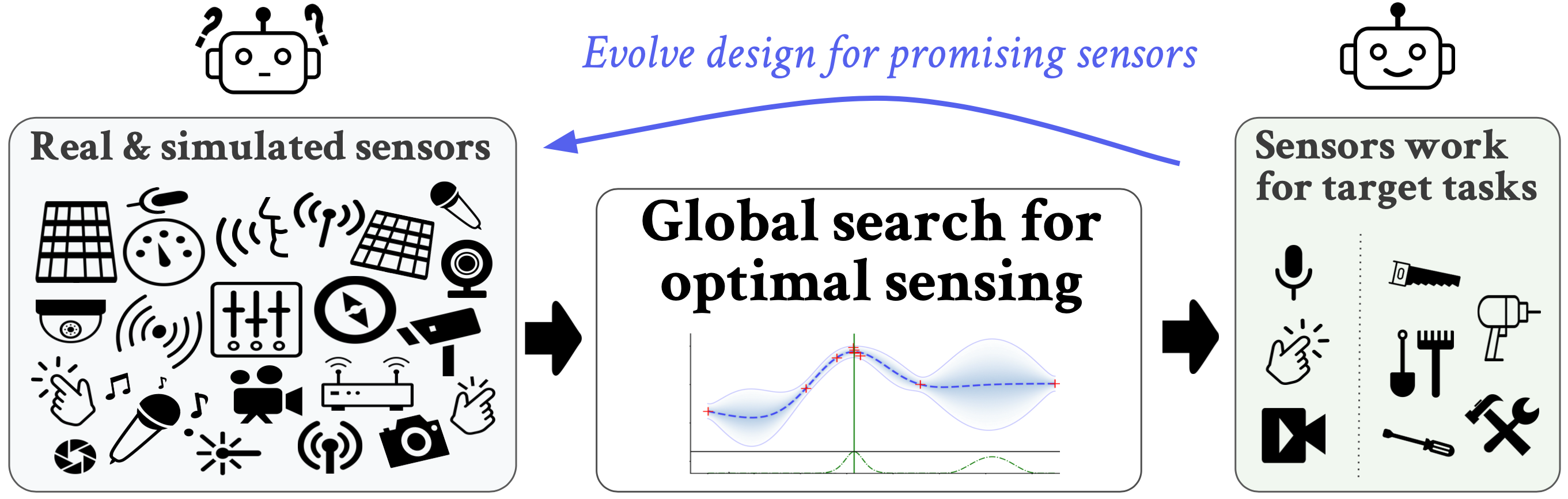
Authors: Rika Antonova, Jeannette Bohg
Contact: rika.antonova@stanford.edu
Links: Paper
Keywords: co-design, multimodal sensing, corl blue sky track
O2O-Afford: Annotation-Free Large-Scale Object-Object Affordance Learning
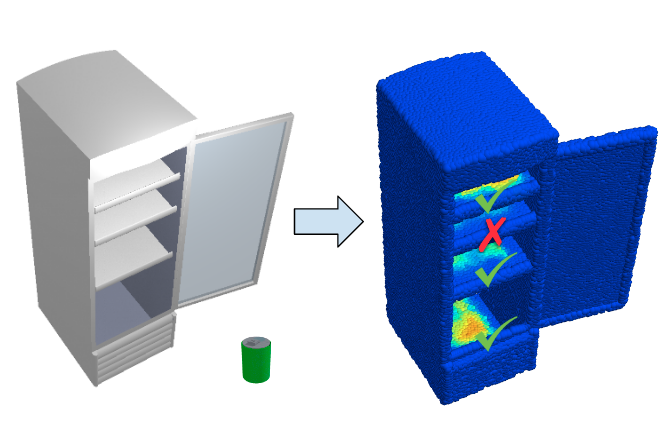
Authors: Kaichun Mo, Yuzhe Qin, Fanbo Xiang, Hao Su, Leonidas J. Guibas
Contact: kaichun@cs.stanford.edu
Links: Paper | Video | Website
Keywords: robotic vision, object-object interaction, visual affordance
ObjectFolder: A Dataset of Objects with Implicit Visual, Auditory, and Tactile Representations
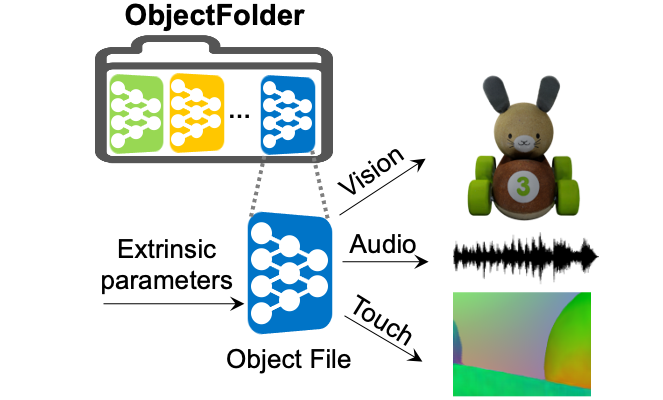
Authors: Ruohan Gao, Yen-Yu Chang, Shivani Mall, Li Fei-Fei, Jiajun Wu
Contact: rhgao@cs.stanford.edu
Links: Paper | Video | Website
Keywords: object dataset, multisensory learning, implicit representations
Taskography: Evaluating robot task planning over large 3D scene graphs
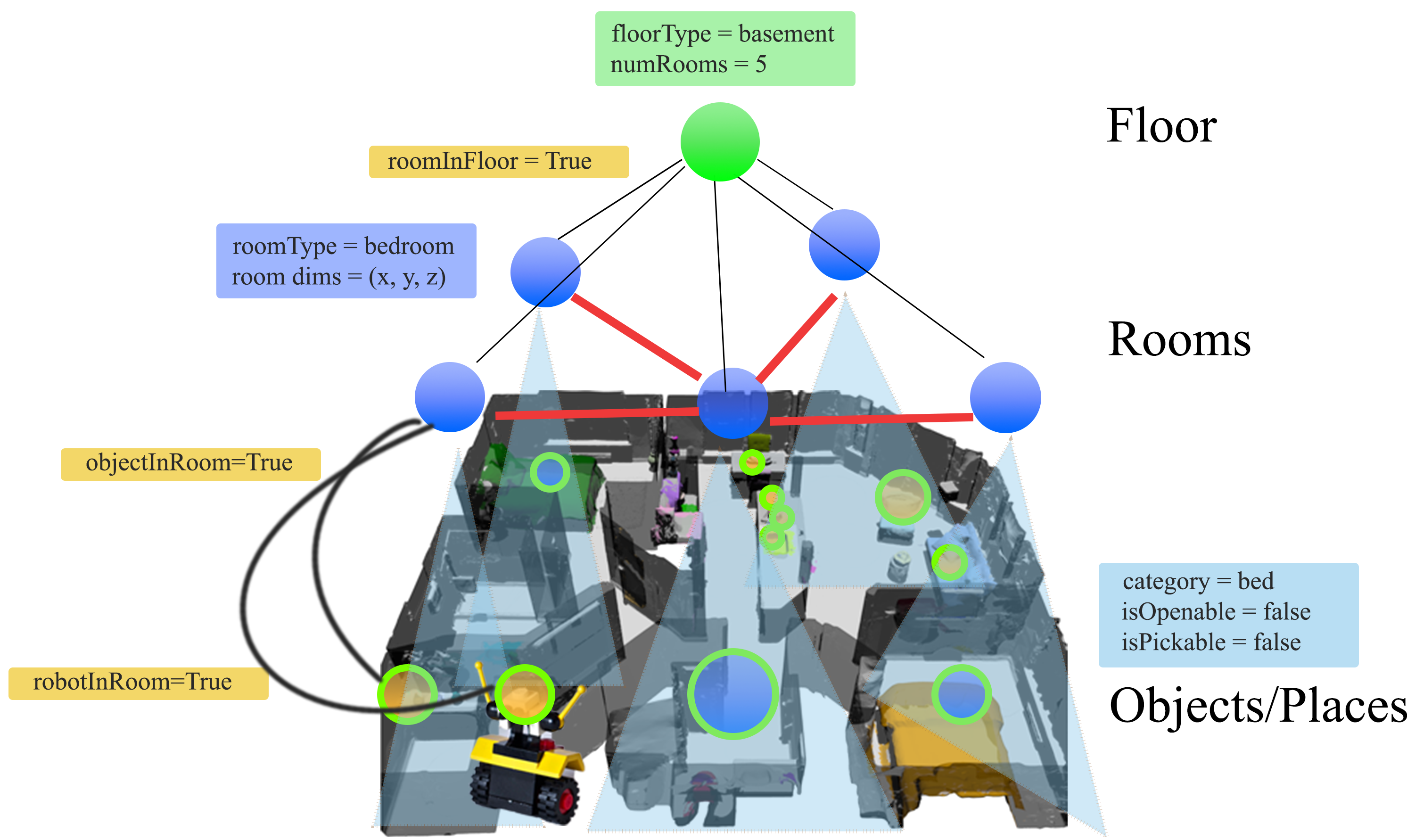
Authors: Christopher Agia, Krishna Murthy Jatavallabhula, Mohamed Khodeir, Ondrej Miksik, Vibhav Vineet, Mustafa Mukadam, Liam Paull, Florian Shkurti
Contact: cagia@stanford.edu
Links: Paper | Website
Keywords: robot task planning, 3d scene graphs, learning to plan, benchmarks
What Matters in Learning from Offline Human Demonstrations for Robot Manipulation
Authors: Ajay Mandlekar, Danfei Xu, Josiah Wong, Soroush Nasiriany, Chen Wang, Rohun Kulkarni, Li Fei-Fei, Silvio Savarese, Yuke Zhu, Roberto Martín-Martín
Contact: amandlek@cs.stanford.edu
Award nominations: Oral
Links: Paper | Blog Post | Video | Website
Keywords: imitation learning, offline reinforcement learning, robot manipulation
XIRL: Cross-embodiment Inverse Reinforcement Learning

Authors: Kevin Zakka, Andy Zeng, Pete Florence, Jonathan Tompson, Jeannette Bohg, Debidatta Dwibedi
Contact: zakka@berkeley.edu
Links: Paper | Website
Keywords: inverse reinforcement learning, imitation learning, self-supervised learning
iGibson 2.0: Object-Centric Simulation for Robot Learning of Everyday Household Tasks
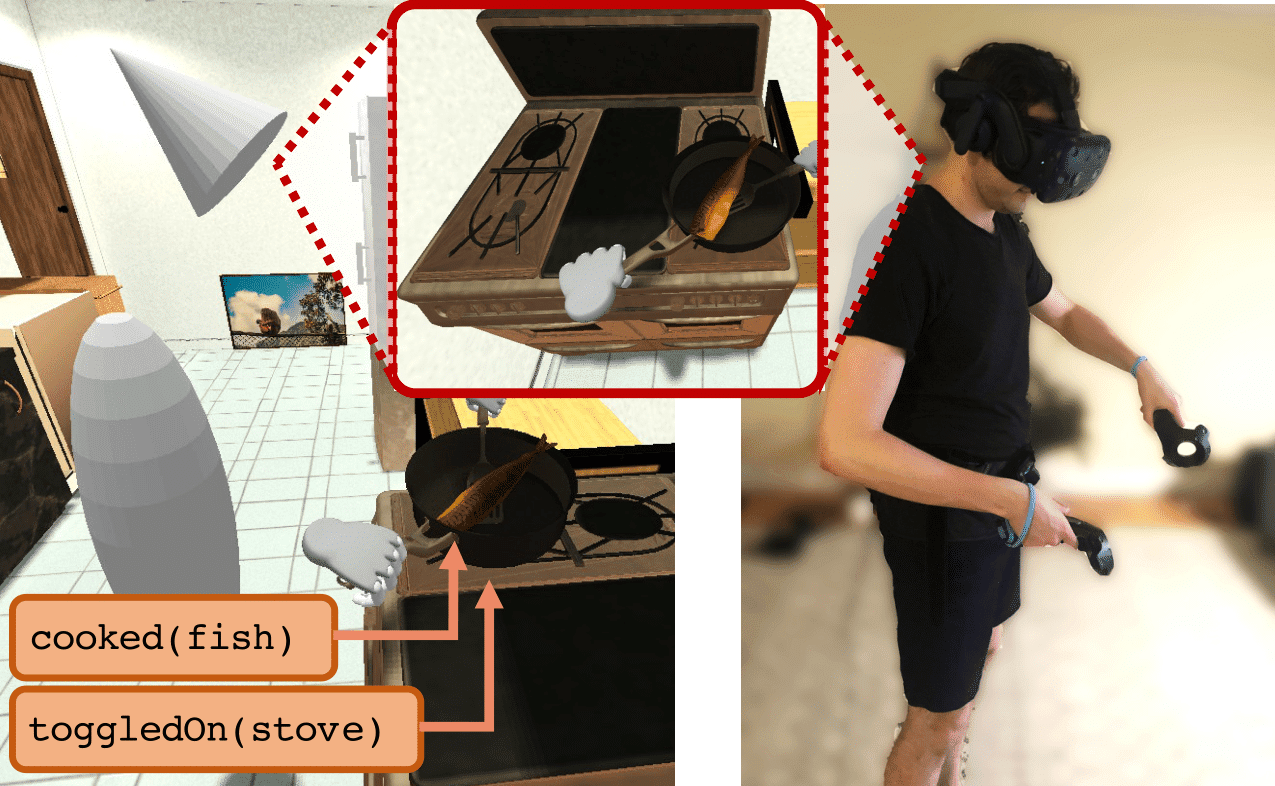
Authors: Chengshu Li*, Fei Xia*, Roberto Martín-Martín*, Michael Lingelbach, Sanjana Srivastava, Bokui Shen, Kent Vainio, Cem Gokmen, Gokul Dharan, Tanish Jain, Andrey Kurenkov, C. Karen Liu, Hyowon Gweon, Jiajun Wu, Li Fei-Fei, Silvio Savarese
Contact: chengshu@stanford.edu
Links: Paper | Website
Keywords: simulation environment, embodied ai, virtual reality interface
Learning Feasibility to Imitate Demonstrators with Different Dynamics
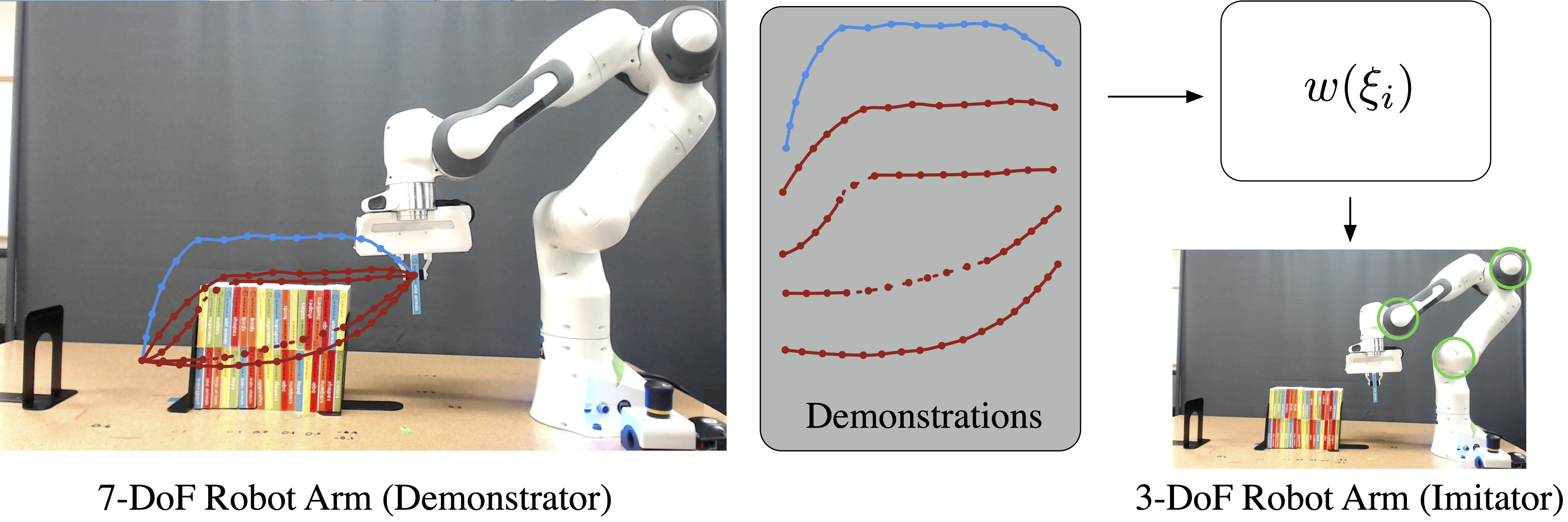
Authors: Zhangjie Cao, Yilun Hao, Mengxi Li, Dorsa Sadigh
Contact: caozj@cs.stanford.edu
Keywords: imitation learning, learning from agents with different dynamics
We look forward to seeing you at CoRL 2021!