In today’s digital age, smartphones and desktop web browsers serve as the primary tools for accessing news and information. However, the proliferation of website clutter — encompassing complex layouts, navigation elements, and extraneous links — significantly impairs both the reading experience and article navigation. This issue is particularly acute for individuals with accessibility requirements.
To improve the user experience and make reading more accessible, Android and Chrome users may leverage the Reading Mode feature, which enhances accessibility by processing webpages to allow customizable contrast, adjustable text size, more legible fonts, and to enable text-to-speech utilities. Additionally, Android’s Reading Mode is equipped to distill content from apps. Expanding Reading Mode to encompass a wide array of content and improving its performance, while still operating locally on the user’s device without transmitting data externally, poses a unique challenge.
To broaden Reading Mode capabilities without compromising privacy, we have developed a novel on-device content distillation model. Unlike early attempts using DOM Distiller — a heuristic approach limited to news articles — our model excels in both quality and versatility across various types of content. We ensure that article content doesn’t leave the confines of the local environment. Our on-device content distillation model smoothly transforms long-form content into a simple and customizable layout for a more pleasant reading journey while also outperforming the leading alternative approaches. Here we explore details of this research highlighting our approach, methodology, and results.
Graph neural networks
Instead of relying on complicated heuristics that are difficult to maintain and scale to a variety of article layouts, we approach this task as a fully supervised learning problem. This data-driven approach allows the model to generalize better across different layouts, without the constraints and fragility of heuristics. Previous work for optimizing the reading experience relied on HTML or parsing, filtering, and modeling of a document object model (DOM), a programming interface automatically generated by the user’s web browser from site HTML that represents the structure of a document and allows it to be manipulated.
The new Reading Mode model relies on accessibility trees, which provide a streamlined and more accessible representation of the DOM. Accessibility trees are automatically generated from the DOM tree and are utilized by assistive technologies to allow people with disabilities to interact with web content. These are available on Chrome Web browser and on Android through AccessibilityNodeInfo objects, which are provided for both WebView and native application content.
We started by manually collecting and annotating accessibility trees. The Android dataset used for this project comprises on the order of 10k labeled examples, while the Chrome dataset contains approximately 100k labeled examples. We developed a novel tool that uses graph neural networks (GNNs) to distill essential content from the accessibility trees using a multi-class supervised learning approach. The datasets consist of long-form articles sampled from the web and labeled with classes such as headline, paragraph, images, publication date, etc.
GNNs are a natural choice for dealing with tree-like data structures, because unlike traditional models that often demand detailed, hand-crafted features to understand the layout and links within such trees, GNNs learn these connections naturally. To illustrate this, consider the analogy of a family tree. In such a tree, each node represents a family member and the connections denote familial relationships. If one were to predict certain traits using conventional models, features like the “number of immediate family members with a trait” might be needed. However, with GNNs, such manual feature crafting becomes redundant. By directly feeding the tree structure into the model, GNNs utilize a message-passing mechanism where each node communicates with its neighbors. Over time, information gets shared and accumulated across the network, enabling the model to naturally discern intricate relationships.
Returning to the context of accessibility trees, this means that GNNs can efficiently distill content by understanding and leveraging the inherent structure and relationships within the tree. This capability allows them to identify and possibly omit non-essential sections based on the information flow within the tree, ensuring more accurate content distillation.
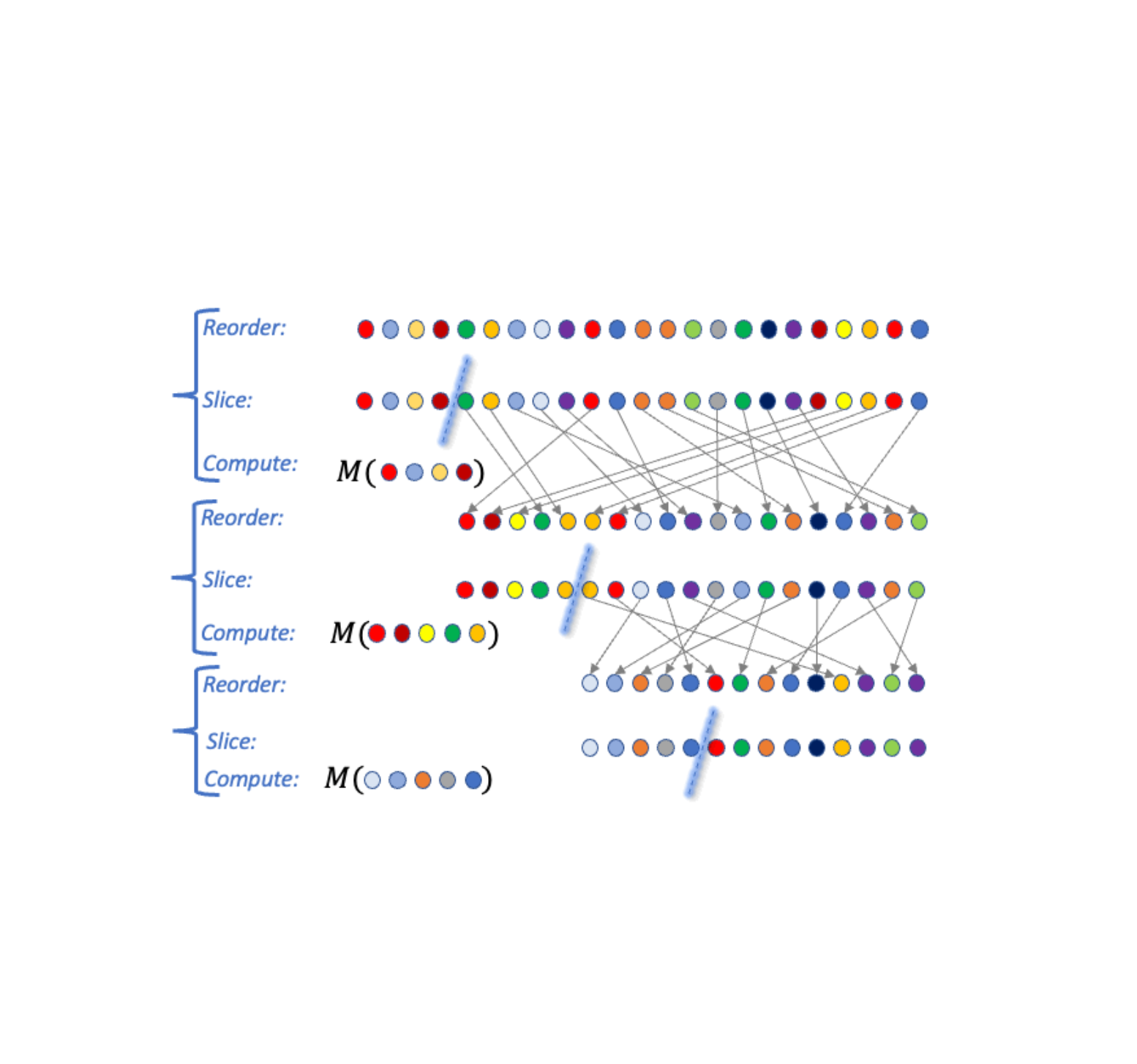
Our architecture heavily follows the encode-process-decode paradigm using a message-passing neural network to classify text nodes. The overall design is illustrated in the figure below. The tree representation of the article is the input to the model. We compute lightweight features based on bounding box information, text information, and accessibility roles. The GNN then propagates each node’s latent representation through the edges of the tree using a message-passing neural network. This propagation process allows nearby nodes, containers, and text elements to share contextual information with each other, enhancing the model’s understanding of the page’s structure and content. Each node then updates its current state based on the message received, providing a more informed basis for classifying the nodes. After a fixed number of message-passing steps, the now contextualized latent representations of the nodes are decoded into essential or non-essential classes. This approach enables the model to leverage both the inherent relationships in the tree and the hand-crafted features representing each node, thereby enriching the final classification.
 |
| A visual demonstration of the algorithm in action, processing an article on a mobile device. A graph neural network (GNN) is used to distill essential content from an article. 1. A tree representation of the article is extracted from the application. 2. Lightweight features are computed for each node, represented as vectors. 3. A message-passing neural network propagates information through the edges of the tree and updates each node representation. 4. Leaf nodes containing text content are classified as essential or non-essential content. 5. A decluttered version of the application is composed based on the GNN output. |
We deliberately restrict the feature set used by the model to increase its broad generalization across languages and speed up inference latency on user devices. This was a unique challenge, as we needed to create an on-device lightweight model that could preserve privacy.
Our final lightweight Android model has 64k parameters and is 334kB in size with a median latency of 800ms, while the Chrome model has 241k parameters, is 928kB in size, and has a 378ms median latency. By employing such on-device processing, we ensure that user data never leaves the device, reinforcing our responsible approach and commitment to user privacy. The features used in the model can be grouped into intermediate node features, leaf-node text features, and element position features. We performed feature engineering and feature selection to optimize the set of features for model performance and model size. The final model was transformed into TensorFlow Lite format to deploy as an on-device model on Android or Chrome.
Results
We trained the GNN for about 50 epochs in a single GPU. The performance of the Android model on webpages and native application test sets is presented below:
 |
| The table presents the content distillation metrics in Android for webpages and native apps. We report precision, recall and F1-score for three classes: non-essential content, headline, and main body text, including macro average and weighted average by number of instances in each class. Node metrics assess the classification performance at the granularity of the accessibility tree node, which is analogous to a paragraph level. In contrast, word metrics evaluate classification at an individual word level, meaning each word within a node gets the same classification. |
<!–
| Android Quality | ||||||||||||
| Webpages | Native Apps | |||||||||||
| node metrics | Precision | Recall | F1-score | Precision | Recall | F1-score | ||||||
| non-essential | 0.9842 | 0.9846 | 0.9844 | 0.9744 | 0.9350 | 0.9543 | ||||||
| headline | 0.9187 | 0.9784 | 0.9476 | 0.9183 | 0.8568 | 0.8865 | ||||||
| main-text | 0.9223 | 0.9172 | 0.9197 | 0.8443 | 0.9424 | 0.8907 | ||||||
| macro-average | 0.9417 | 0.9600 | 0.9506 | 0.9124 | 0.9114 | 0.9105 | ||||||
| weighted average | 0.9736 | 0.9736 | 0.9736 | 0.9392 | 0.9353 | 0.9363 | ||||||
| headline + main-text | 0.9510 | 0.9683 | 0.9595 | 0.9473 | 0.9507 | 0.9490 | ||||||
| The table presents the content distillation metrics in Android for webpages and native apps. We report precision, recall and F1-score for three classes: non-essential content, headline, and main body text, including macro average and weighted average by number of instances in each class. Node metrics assess the classification performance at the granularity of the accessibility tree node, which is analogous to a paragraph level. In contrast, word metrics evaluate classification at an individual word level, meaning each word within a node gets the same classification. |
–>
In assessing the results’ quality on commonly visited webpage articles, an F1-score exceeding 0.9 for main-text (essentially paragraphs) corresponds to 88% of these articles being processed without missing any paragraphs. Furthermore, in over 95% of cases, the distillation proves to be valuable for readers. Put simply, the vast majority of readers will perceive the distilled content as both pertinent and precise, with errors or omissions being an infrequent occurrence.
The comparison of Chrome content distillation with other models such as DOM Distiller or Mozilla Readability on a set of English language pages is presented in the table below. We reuse the metrics from machine translation to compare the quality of these models. The reference text is from the groundtruth main content and the text from the models as hypothesis text. The results show the excellent performance of our models in comparison to other DOM-based approaches.
 |
| The table presents the comparison between DOM-Distiller, Mozilla Readability and the new Chrome model. We report text-based metrics, such as BLUE, CHRF and ROUGE, by comparing the main body text distilled from each model to a ground-truth text manually labeled by raters using our annotation policy. |
<!–
| Chrome Model Comparison on Webpages | ||||||
| Metric / Model | DOM Distiller | Mozilla Readability | Our Chrome model | |||
| BLEU | 78.97 | 79.16 | 94.59 | |||
| CHRF | 0.92 | 0.92 | 0.98 | |||
| ROUGE1 | 84.10 | 84.62 | 95.13 | |||
| ROUGE2 | 81.84 | 82.66 | 94.81 | |||
| ROUGE3 | 80.21 | 81.45 | 94.60 | |||
| ROUGEL | 83.58 | 84.02 | 95.04 | |||
| ROUGEL-SUM | 83.46 | 84.03 | 95.04 | |||
| The table presents the comparison between DOM-Distiller, Mozilla Readability and the new Chrome model. We report text-based metrics, such as BLUE, CHRF and ROUGE, by comparing the main body text distilled from each model to a ground-truth text manually labeled by raters using our annotation policy. |
–>
The F1-score of the Chrome content distillation model for headline and main text content on the test sets of different widely spoken languages demonstrates that the Chrome model, in particular, is able to support a wide range of languages.
 |
| The table presents per language of F1-scores of the Chrome model for the headline and main text classes. The language codes correspond to the following languages: German, English, Spanish, French, Italian, Persian, Japanese, Korean, Portuguese, Vietnamese, simplified Chinese and traditional Chinese. |
<!–
| Chrome Model on Different Languages | ||||||||||||||||||||||||||
| F1-score | de | en | es | fr | it | fa | ja | ko | pt | vi | zh-Hans | zh-Hant | average | |||||||||||||
| headline | 0.91 | 0.97 | 0.99 | 0.98 | 0.97 | 0.89 | 0.97 | 0.98 | 0.99 | 0.98 | 0.97 | 0.93 | 0.96 | |||||||||||||
| main text | 0.84 | 0.90 | 0.93 | 0.91 | 0.93 | 0.87 | 0.88 | 0.91 | 0.91 | 0.90 | 0.90 | 0.90 | 0.90 | |||||||||||||
| The table presents per language of F1-scores of the Chrome model for the headline and main text classes. The language codes correspond to the following languages: German, English, Spanish, French, Italian, Persian, Japanese, Korean, Portuguese, Vietnamese, simplified Chinese and traditional Chinese. |
–>
Conclusion
The digital age demands both streamlined content presentation and an unwavering commitment to user privacy. Our research highlights the effectiveness of Reading Mode in platforms like Android and Chrome, offering an innovative, data-driven approach to content parsing through Graph Neural Networks. Crucially, our lightweight on-device model ensures that content distillation occurs without compromising user data, with all processes executed locally. This not only enhances the reading experience but also reinforces our dedication to user privacy. As we navigate the evolving landscape of digital content consumption, our findings underscore the paramount importance of prioritizing the user in both experience and security.
Acknowledgements
This project is the result of joint work with Manuel Tragut, Mihai Popa, Abodunrinwa Toki, Abhanshu Sharma, Matt Sharifi, David Petrou and Blaise Aguera y Arcas. We sincerely thank our collaborators Gang Li and Yang Li. We are very grateful to Tom Small for assisting us in preparing the post.
 A look at Data Commons, Google’s initiative to make publicly available data more useful for people working on solutions to societal challenges.
A look at Data Commons, Google’s initiative to make publicly available data more useful for people working on solutions to societal challenges.






 Google.org is funding 15 projects that will use AI to make progress on the UN’s Sustainable Development Goals.
Google.org is funding 15 projects that will use AI to make progress on the UN’s Sustainable Development Goals.













 Since Google was founded, we’ve worked to answer hard questions, help people get answers to theirs, and move technology forward for the world.
Since Google was founded, we’ve worked to answer hard questions, help people get answers to theirs, and move technology forward for the world.


 We’re bringing generative AI capabilities in Search (SGE) to more people, making Search Labs available in India and Japan.
We’re bringing generative AI capabilities in Search (SGE) to more people, making Search Labs available in India and Japan.