This week, the 16th European Conference on Computer Vision (ECCV2020) begins, a premier forum for the dissemination of research in computer vision and related fields. Being held virtually for the first time this year, Google is proud to be an ECCV2020 Platinum Partner and is excited to share our research with the community with nearly 50 accepted publications, alongside several tutorials and workshops.
If you are registered for ECCV this year, please visit our virtual booth in the Platinum Exhibition Hall to learn more about the research we’re presenting at ECCV 2020, including some demos and opportunities to connect with our researchers. You can also learn more about our contributions below (Google affiliations in bold).
Organizing Committee
General Chairs: Vittorio Ferrari, Bob Fisher, Cordelia Schmid, Emanuele TrucoAcademic Demonstrations Chair: Thomas Mensink
Accepted Publications
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis (Honorable Mention Award)
Ben Mildenhall, Pratul Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, Ren Ng
Quaternion Equivariant Capsule Networks for 3D Point Clouds
Yongheng Zhao, Tolga Birdal, Jan Eric Lenssen, Emanuele Menegatti, Leonidas Guibas, Federico Tombari
SoftpoolNet: Shape Descriptor for Point Cloud Completion and Classification
Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari
Combining Implicit Function Learning and Parametric Models for 3D Human Reconstruction
Bharat Lal Bhatnagar, Cristian Sminchisescu, Christian Theobalt, Gerard Pons-Moll
CoReNet: Coherent 3D scene reconstruction from a single RGB image
Stefan Popov, Pablo Bauszat, Vittorio Ferrari
Adversarial Generative Grammars for Human Activity Prediction
AJ Piergiovanni, Anelia Angelova, Alexander Toshev, Michael S. Ryoo
Self6D: Self-Supervised Monocular 6D Object Pose Estimation
Gu Wang, Fabian Manhardt, Jianzhun Shao, Xiangyang Ji, Nassir Navab, Federico Tombari
Du2Net: Learning Depth Estimation from Dual-Cameras and Dual-Pixels
Yinda Zhang, Neal Wadhwa, Sergio Orts-Escolano, Christian Häne, Sean Fanello, Rahul Garg
What Matters in Unsupervised Optical Flow
Rico Jonschkowski, Austin Stone, Jonathan T. Barron, Ariel Gordon, Kurt Konolige, Anelia Angelova
Appearance Consensus Driven Self-Supervised Human Mesh Recovery
Jogendra N. Kundu, Mugalodi Rakesh, Varun Jampani, Rahul M. Venkatesh, R. Venkatesh Babu
Fashionpedia: Ontology, Segmentation, and an Attribute Localization Dataset
Menglin Jia, Mengyun Shi, Mikhail Sirotenko, Yin Cui, Claire Cardie, Bharath Hariharan, Hartwig Adam, Serge Belongie
PointMixup: Augmentation for Point Clouds
Yunlu Chen, Vincent Tao Hu, Efstratios Gavves, Thomas Mensink, Pascal Mettes1, Pengwan Yang, Cees Snoek
Connecting Vision and Language with Localized Narratives (see our blog post)
Jordi Pont-Tuset, Jasper Uijlings, Soravit Changpinyo, Radu Soricut, Vittorio Ferrari
Big Transfer (BiT): General Visual Representation Learning (see our blog post)
Alexander Kolesnikov, Lucas Beyer, Xiaohua Zhai, Joan Puigcerver, Jessica Yung, Sylvain Gelly, Neil Houlsby
View-Invariant Probabilistic Embedding for Human Pose
Jennifer J. Sun, Jiaping Zhao, Liang-Chieh Chen, Florian Schroff, Hartwig Adam, Ting Liu
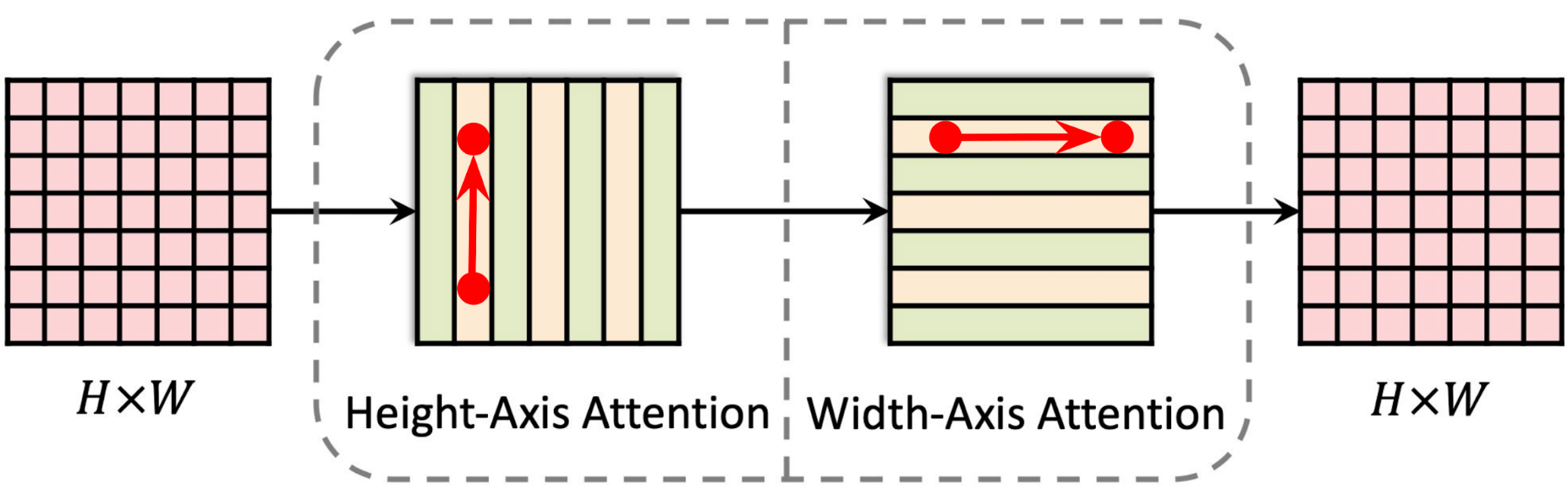
Axial-DeepLab: Stand-Alone Axial-Attention for Panoptic Segmentation
Huiyu Wang, Yukun Zhu, Bradley Green, Hartwig Adam, Alan Yuille, Liang-Chieh Chen
Mask2CAD: 3D Shape Prediction by Learning to Segment and Retrieve
Weicheng Kuo, Anelia Angelova, Tsung-Yi Lin, Angela Dai
A Generalization of Otsu’s Method and Minimum Error Thresholding
Jonathan T. Barron
Learning to Factorize and Relight a City
Andrew Liu, Shiry Ginosar, Tinghui Zhou, Alexei A. Efros, Noah Snavely
Weakly Supervised 3D Human Pose and Shape Reconstruction with Normalizing Flows
Andrei Zanfir, Eduard Gabriel Bazavan, Hongyi Xu, Bill Freeman, Rahul Sukthankar, Cristian Sminchisescu
Multi-modal Transformer for Video Retrieval
Valentin Gabeur, Chen Sun, Karteek Alahari, Cordelia Schmid
Generative Latent Textured Proxies for Category-Level Object Modeling
Ricardo Martin Brualla, Sofien Bouaziz, Matthew Brown, Rohit Pandey, Dan B Goldman
Neural Design Network: Graphic Layout Generation with Constraints
Hsin-Ying Lee*, Lu Jiang, Irfan Essa, Phuong B Le, Haifeng Gong, Ming-Hsuan Yang, Weilong Yang
Neural Articulated Shape Approximation
Boyang Deng, Gerard Pons-Moll, Timothy Jeruzalski, JP Lewis, Geoffrey Hinton, Mohammad Norouzi, Andrea Tagliasacchi
Uncertainty-Aware Weakly Supervised Action Detection from Untrimmed Videos
Anurag Arnab, Arsha Nagrani, Chen Sun, Cordelia Schmid
Beyond Controlled Environments: 3D Camera Re-Localization in Changing Indoor Scenes
Johanna Wald, Torsten Sattler, Stuart Golodetz, Tommaso Cavallari, Federico Tombari
Consistency Guided Scene Flow Estimation
Yuhua Chen, Luc Van Gool, Cordelia Schmid, Cristian Sminchisescu
Continuous Adaptation for Interactive Object Segmentation by Learning from Corrections
Theodora Kontogianni*, Michael Gygli, Jasper Uijlings, Vittorio Ferrari
SimPose: Effectively Learning DensePose and Surface Normal of People from Simulated Data
Tyler Lixuan Zhu, Per Karlsson, Christoph Bregler
Learning Data Augmentation Strategies for Object Detection
Barret Zoph, Ekin Dogus Cubuk, Golnaz Ghiasi, Tsung-Yi Lin, Jonathon Shlens, Quoc V Le
Streaming Object Detection for 3-D Point Clouds
Wei Han, Zhengdong Zhang, Benjamin Caine, Brandon Yang, Christoph Sprunk, Ouais Alsharif, Jiquan Ngiam, Vijay Vasudevan, Jonathon Shlens, Zhifeng Chen
Improving 3D Object Detection through Progressive Population Based Augmentation
Shuyang Cheng, Zhaoqi Leng, Ekin Dogus Cubuk, Barret Zoph, Chunyan Bai, Jiquan Ngiam, Yang Song, Benjamin Caine, Vijay Vasudevan, Congcong Li, Quoc V. Le, Jonathon Shlens, Dragomir Anguelov
An LSTM Approach to Temporal 3D Object Detection in LiDAR Point Clouds
Rui Huang, Wanyue Zhang, Abhijit Kundu, Caroline Pantofaru, David A Ross, Thomas Funkhouser, Alireza Fathi
BigNAS: Scaling Up Neural Architecture Search with Big Single-Stage Models
Jiahui Yu, Pengchong Jin, Hanxiao Liu, Gabriel Bender, Pieter-Jan Kindermans, Mingxing Tan, Thomas Huang, Xiaodan Song, Ruoming Pang, Quoc Le
Memory-Efficient Incremental Learning Through Feature Adaptation
Ahmet Iscen, Jeffrey Zhang, Svetlana Lazebnik, Cordelia Schmid
Virtual Multi-view Fusion for 3D Semantic Segmentation
Abhijit Kundu, Xiaoqi Yin, Alireza Fathi, David A Ross, Brian E Brewington, Thomas Funkhouser, Caroline Pantofaru
Efficient Scale-permuted Backbone with Learned Resource Distribution
Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Yin Cui, Mingxing Tan, Quoc V Le, Xiaodan Song
RetrieveGAN: Image Synthesis via Differentiable Patch Retrieval
Hung-Yu Tseng*, Hsin-Ying Lee*, Lu Jiang, Ming-Hsuan Yang, Weilong Yang
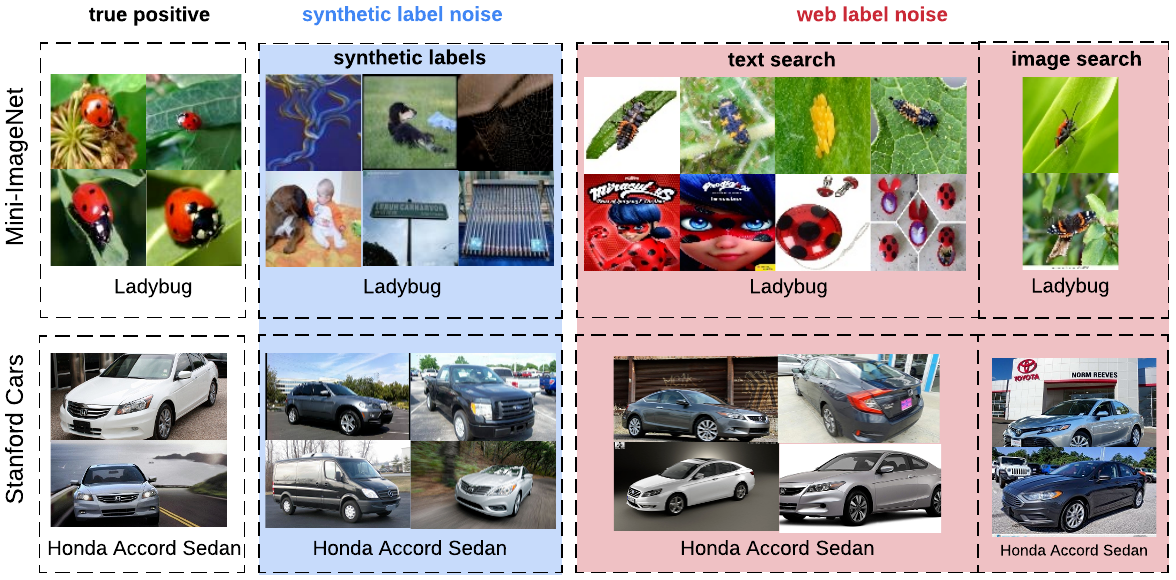
Graph convolutional networks for learning with few clean and many noisy labels
Ahmet Iscen, Giorgos Tolias, Yannis Avrithis, Ondrej Chum, Cordelia Schmid
Deep Positional and Relational Feature Learning for Rotation-Invariant Point Cloud Analysis
Ruixuan Yu, Xin Wei, Federico Tombari, Jian Sun
Federated Visual Classification with Real-World Data Distribution
Tzu-Ming Harry Hsu, Hang Qi, Matthew Brown
Joint Bilateral Learning for Real-time Universal Photorealistic Style Transfer
Xide Xia, Meng Zhang, Tianfan Xue, Zheng Sun, Hui Fang, Brian Kulis, Jiawen Chen
AssembleNet++: Assembling Modality Representations via Attention Connections
Michael S. Ryoo, AJ Piergiovanni, Juhana Kangaspunta, Anelia Angelova
Naive-Student: Leveraging Semi-Supervised Learning in Video Sequences for Urban Scene Segmentation
Liang-Chieh Chen, Raphael Gontijo-Lopes, Bowen Cheng, Maxwell D. Collins, Ekin D. Cubuk, Barret Zoph, Hartwig Adam, Jonathon Shlens
AttentionNAS: Spatiotemporal Attention Cell Search for Video Classification
Xiaofang Wang, Xuehan Xiong, Maxim Neumann, AJ Piergiovanni, Michael S. Ryoo, Anelia Angelova, Kris M. Kitani, Wei Hua
Unifying Deep Local and Global Features for Image Search
Bingyi Cao, Andre Araujo, Jack Sim
Pillar-based Object Detection for Autonomous Driving
Yue Wang, Alireza Fathi, Abhijit Kundu, David Ross, Caroline Pantofaru, Tom Funkhouser, Justin Solomon
Improving Object Detection with Selective Self-supervised Self-training
Yandong Li, Di Huang, Danfeng Qin, Liqiang Wang, Boqing Gong
Environment-agnostic Multitask Learning for Natural Language Grounded NavigationXin Eric Wang*, Vihan Jain, Eugene Ie, William Yang Wang, Zornitsa Kozareva, Sujith Ravi
SimAug: Learning Robust Representations from Simulation for Trajectory Prediction
Junwei Liang, Lu Jiang, Alex Hauptmann
Tutorials
New Frontiers for Learning with Limited Labels or Data
Organizers: Shalini De Mello, Sifei Liu, Zhiding Yu, Pavlo Molchanov, Varun Jampani, Arash Vahdat, Animashree Anandkumar, Jan Kautz
Weakly Supervised Learning in Computer Vision
Organizers: Seong Joon Oh, Rodrigo Benenson, Hakan Bilen
Workshops
Joint COCO and LVIS Recognition Challenge
Organizers: Alexander Kirillov, Tsung-Yi Lin, Yin Cui, Matteo Ruggero Ronchi, Agrim Gupta, Ross Girshick, Piotr Dollar
4D Vision
Organizers: Anelia Angelova, Vincent Casser, Jürgen Sturm, Noah Snavely, Rahul Sukthankar
GigaVision: When Gigapixel Videography Meets Computer Vision
Organizers: Lu Fang, Shengjin Wang, David J. Brady, Feng Yang
Advances in Image Manipulation Workshop and Challenges
Organizers: Radu Timofte, Andrey Ignatov, Luc Van Gool, Wangmeng Zuo, Ming-Hsuan Yang, Kyoung Mu Lee, Liang Lin, Eli Shechtman, Kai Zhang, Dario Fuoli, Zhiwu Huang, Martin Danelljan, Shuhang Gu, Ming-Yu Liu, Seungjun Nah, Sanghyun Son, Jaerin Lee, Andres Romero, ETH Zurich, Hannan Lu, Ruofan Zhou, Majed El Helou, Sabine Süsstrunk, Roey Mechrez, BeyondMinds & Technion, Pengxu Wei, Evangelos Ntavelis, Siavash Bigdeli
Robust Vision Challenge 2020
Organizers:Oliver Zendel, Hassan Abu Alhaija, Rodrigo Benenson, Marius Cordts, Angela Dai, Xavier Puig Fernandez, Andreas Geiger, Niklas Hanselmann, Nicolas Jourdan, Vladlen Koltun, Peter Kontschider, Alina Kuznetsova, Yubin Kang, Tsung-Yi Lin, Claudio Michaelis, Gerhard Neuhold, Matthias Niessner, Marc Pollefeys, Rene Ranftl, Carsten Rother, Torsten Sattler, Daniel Scharstein, Hendrik Schilling, Nick Schneider, Jonas Uhrig, Xiu-Shen Wei, Jonas Wulff, Bolei Zhou
“Deep Internal Learning”: Training with no prior examples
Organizers: Michal Irani,Tomer Michaeli, Tali Dekel, Assaf Shocher, Tamar Rott Shaham
Instance-Level Recognition
Organizers: Andre Araujo, Cam Askew, Bingyi Cao, Ondrej Chum, Bohyung Han, Torsten Sattler, Jack Sim, Giorgos Tolias, Tobias Weyand, Xu Zhang
Women in Computer Vision Workshop (WiCV) (Platinum Sponsor)
Panel Participation: Dina Damen, Sanja Fiddler, Zeynep Akata, Grady Booch, Rahul Sukthankar
*Work performed while at Google
 Read More
Read More